�y�T��λ��ԭ��Ӯ�
�y�T��λ���К�Ӻ�늄Ӄɴ���ǚ�ӈ�(zh��)��������Ҫ���������c����{(di��o)��(ji��)�y����ʹ�á��y�T��λ�������{(di��o)��(ji��)��ݔ����̖��Ȼ���{(di��o)��(ji��)���ĺ�����̖�ɱ�����ݔ������(zh��)�ЙC(j��)��(g��u)����(d��ng)�y�U�Ƅ��Ժ���λ��ͯ��ͨ�^�C(j��)е�b��ؓ(f��)�����������y�T��λ����������c��(zh��)�ЙC(j��)��(g��u)�M��һ���]�h(hu��n)ϵ�y(t��ng)��
�y�T��λ���܉����ӈ�(zh��)�ЙC(j��)��(g��u)��������ʣ��p�ٿ�����̖�Ă��f���ӿ��y�U���Ƅ��ٶȡ������̖�c�yλ�g�ľ��Զȣ��˷��y�U��Ħ������������ƽ������Ӱ푣��Ķ����C�{(di��o)��(ji��)�y�����_��λ���������{(di��o)��(ji��)�y�����ܡ�Ŀǰʹ��늄��{(di��o)��(ji��)���Ӷ࣬�@���B�һ���y�T��λ����
�Y(ji��)��(g��u)�c����ԭ��
�����һ���y�T��λ������늄��{(di��o)��(ji��)��ݔ����0-10mA��4-2OmA DC�����̖ȥ�ٿv��ӈ�(zh��)�ЙC(j��)��(g��u)��һ�_�һ���y�T��λ�������һ���D(zhu��n)�Q���͚���y�T��λ�����p�����á�
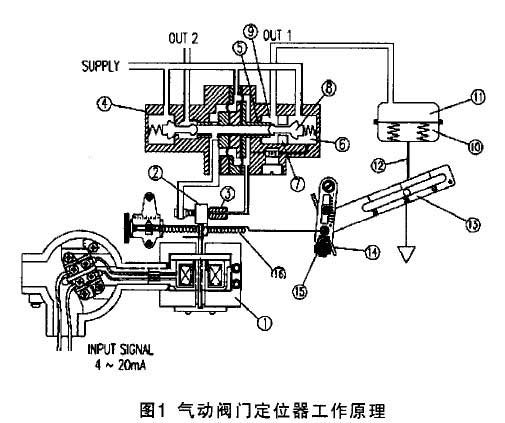
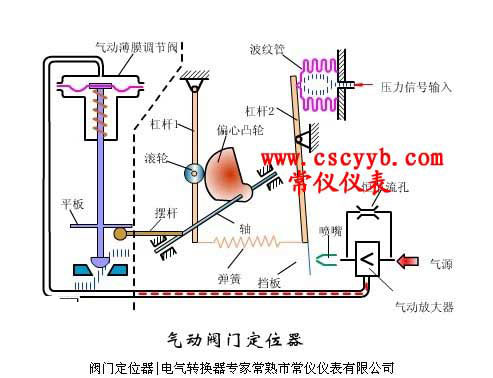
�D9-18�����ӱ�Ĥ��(zh��)�ЙC(j��)��(g��u)���-���y�T��λ���Ą���ԭ��D�͌���D��
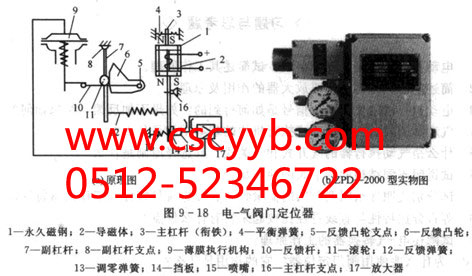
�����ô��1����(d��o)���w2����Ȧ����F(�����ܗU3)������϶��(g��u)���������R�_(d��)�M�������nj����׃?y��u)��?����)���D(zhu��n)�QԪ������(d��o)���w����F�øߌ�(d��o)�����ܵ���Ī�Ͻ��Ƴɡ����ô�䓳�U�Σ���˲�N��S�ɘO���ڌ�(d��o)���w�ϡ���(d��ng)��̖���ͨ�^��Ȧ�r������늴ň������ô�䓵�����ã�ʹ���ܗU3�ܵ�һ������������������@֧�c16ƫ�D(zhu��n)��ʹ����14��������15�����챳����(j��ng)�Ŵ���17�Ŵ�����˱�Ĥ��(zh��)�ЙC(j��)��(g��u)9ʹ�y�U�����Ƅӣ������ӷ����U10�@֧�c5�D(zhu��n)�ӡ��B��ͬһ�S�ϵķ���݆6Ҳ����rᘷ����D(zhu��n)�ӣ�ͨ�^�L݆11ʹ���ܗU7�@֧�c8�D(zhu��n)�ӣ�����������12���졣��ٝ12�����ܗU�������c�����R�_(d��)���������ܗU�ϵ�����������ƽ��r���x�����_(d��)��ƽ���B(t��i)���˕r��һ������̖����ͱ��D(zhu��n)�Q��һ���Ě≺��̖�����c�y�Tλ�óɾ��_�Č���(y��ng)�P(gu��n)ϵ������13�����{(di��o)����λ�õġ���׃݆6���Π���Ը�׃ݔ�������̖�cݔ���y�Uλ�ƵČ���(y��ng)�P(gu��n)ϵ��
�y�T�������
(1)���ӈ�(zh��)�ЙC(j��)��(g��u)��������ͨ�^��߶�λ���Ě�Դ�����������(zh��)�ЙC(j��)��(g��u)����������ɿ˷����|(zh��)���yо�IJ�ƽ������Ҳ�ɿ˷��y�U�c�����g�^���Ħ��������|(zh��)���y�U�ƄӮa(ch��n)�����^����������ˣ��y�T��λ�������ڸ߉����ڏ����߉����ߜء��͜ؼ����|(zh��)�к��й��w�Ҹ����ճ�����w�Ĉ��ϡ�
(2)�ӿ��(zh��)�ЙC(j��)��(g��u)�Ą����ٶȡ��{(di��o)��(ji��)���c��(zh��)�ЙC(j��)��(g��u)���x�^�h(yu��n)�r�����˿˷���̖�Ă��f���ӿ��(zh��)�ЙC(j��)��(g��u)�Ą����ٶȣ����ʹ�ö�λ����һ�����ڃ������60m���ϵĈ��ϡ�
(3)���F(xi��n)�ֳ̿��ơ��ֳ̿��ƕr�����_��λ����һ���{(di��o)��(ji��)�����ٿv��ÿ�_��λ���Ĺ����^(q��)�g�ɷֳ��c�Q�����ٶ��ֳ��c��50%���t�{(di��o)��(ji��)��0%-50%ݔ���r����һ�_��λ����� 0%-100%.�ڶ��_��λ��������0;�{(di��o)��(ji��)�����50%^-100%�r���ڶ��_��λ��ݔ��0% ~100%����һ�_��λ������һֱ������100%.
(4)�����{(di��o)��(ji��)�y���������ԡ�ͨ�^��׃����݆�Ď��Π���Ը�׃�{(di��o)��(ji��)�y����f���ԣ��@����鷴��݆�Π��׃������׃�ˈ�(zh��)�ЙC(j��)��(g��u)����λ���ķ�����׃��Ҏ(gu��)�ɣ�ʹ��λ����ݔ�����l(f��)��׃�����Ķ���׃�˶�λ��ݔ����̖�c��(zh��)�ЙC(j��)��(g��u)���λ���g���P(gu��n)ϵ������������ͯ���ԡ�
�������⣬��λ��߀��ʹ��(zh��)�ЙC(j��)��(g��u)�Ƀ�λ����׃�ɱ����������ܸ�׃�{(di��o)��(ji��)�y��������ʽ����������Ҫ�һ���D(zhu��n)�Q�ď�(f��)�Ͽ����С�
|















![�y�T��λ����ݔ����̖��ݔ����С��]��](/UpFile/201208/2012080760205593.jpg)


